Descripción de un sistema de control que permite la circulación simultánea de varios trenes, unos controlados por Maquinistas y el resto por el Ordenador, bajo el gobierno de un Puesto de Mando situado en el Ordenador Central, mediante un programa propio cuyas funcionalidades no necesariamente coinciden con las de los programas comerciales.
(Un click en cualquier Figura, la abre, con más definición, en otra ventana)
0. Fotos








1. Introducción

Figura 1. Vista general de la maqueta. La decoración es convencional no ajustada a un ambiente determinado. El énfasis está en la circulación de trenes y en los variados modos de operación que brinda la digitalización cuando se añade un Ordenador.
Esta maqueta (Figura 1) no pretende reproducir un ambiente ferroviario determinado en época y lugar, hay infinidad de modelistas que lo hacen mucho mejor. Lo que pretende es gestionar una red compleja de circulaciones en un espacio reducido (2 metros cuadrados en escala N) de forma realista y segura, aplicando mucha tecnología en software y electrónica, permitiendo al aficionado elegir entre uno o más roles: Maquinista, Operador de CTC o Jefe de Estación.

Figura 2. Las palancas dan la opción de actuar como Jefe de Estación sobre las señales de entrada/salida y los cambios de desvíos.
Al convertir todo el proceso analógico en digital por ordenador, las posibilidades de realismo por el control y la automatización se incrementan de forma espectacular y permiten una gestión integral capaz de arrancar, acelerar, decelerar y detener trenes, activar señales acústicas en locomotoras, garantizar la seguridad de las circulaciones, cambiar desvíos sin riesgos, posicionar señales luminosas, establecer itinerarios y rutas, fijar horarios, dar avisos sonoros en estaciones, gestionar la iluminación del día y de la noche, etc. Todo ello sin renunciar a ser un Maquinista o un Jefe de Estación.
2. Diseño y construcción

Figura 3. Esquema de vías. Azul: Vías a la vista. Negro: Vías ocultas. Rojo: Bucles de retorno. Es vía única en bucle, permitiendo circular simultáneamente más de un tren en cada sentido, con dos estaciones de cruce y una playa de vías dentro del bucle y otra playa de vías fuera del bucle. Los bucles de retorno, ambos ocultos, permiten cambiar el sentido de la marcha en cualquiera de los dos sentidos.
La Figura 3 muestra el esquema de vías. Todos los cantones, estaciones y playas incluidas, son banalizados permitiendo una circulación compleja en ambos sentidos.
Al carecer de doble vía, exige al operador del Control de Tráfico o al Jefe de Estación una atención especial para gestionar el cruce de las circulaciones. Algo que, si es el caso, el algoritmo del programa resuelve automáticamente con rapidez y sin riesgos.

Figura 4. Para el diseño de la maqueta se ha usado el programa de CAD 3RdPlanIt con las librerías de elementos de Peco. Permite plotear los planos a escala 1:1 para cortar el contrachapado con precisión y colocar según el dibujo las vias, motores de desvíos y señales.
El diseño de la maqueta (Figuras 4 y 5) se ha realizado con un programa CAD que garantiza los radios, las pendientes y los gálibos y que permite plotear el diseño a escala 1:1, disponiendo así de los planos exactos para cortar el contrachapado. En estos planos se incluyen, además de las vías y su plataforma, las marcas para las señales, los motores de los desvíos y los postes de catenarias.

Figura 5. Plano de la parte visible de las vías con sus dos estaciones, las señales luminosas, la catenaria y los motores de aguja. Las dos estaciones ocultas están superpuestas al fondo del dibujo. (Verlas mejor en la Figura 6)
El radio mínimo, solamente utilizado en vías ocultas, es de 22,8 cm. y la pendiente máxima, en la espiral, de 29 milésimas. Todos los desvíos son Peco Electrofrog. Y los motores de desvíos son de movimiento lento, excepto algunos en vías ocultas. La vías son Peco código 55 flexibles, salvo en las curvas más cerradas, que para asegurar un radio constante, son rígidas código 80.

Figura 6. Colocadas las vías y los motores de desvíos, a falta de la electrónica y la orografía. En primer plano las dos playas de vías ocultas.
En el diseño y construcción de la infraestructura ya se preveía el espacio necesario para situar toda la circuitería de la electrónica asociada, repartiéndola a lo ancho de toda la parte inferior de la maqueta (Figura 11).
3. Hardware y electrónica

Figura 8. Esquema electrónico convencional de una red digitalizada DCC controlada por ordenador. La línea roja alimenta las locomotoras y dispositivos como desvíos y señales. La línea verde envía al ordenador el estado de las ocupaciones de los cantones, la situación de los desvíos y otras señales.
Un control digital DCC por ordenador (Figura 8) consta sucintamente de 4 elementos: Ordenador Central, Unidad de Control DCC, Módulos de Dispositivos y Módulos de Retroseñalización, que se resumen a continuación:
3.1 Ordenador Central
Es un PC que actúa como puesto de mando del Control de Tráfico Centralizado (CTC) con un Tablero de Control Óptico (TCO) gestionando todo el sistema. Desde aquí el Operador dirige y controla el funcionamiento de la red ferroviaria mediante la pantalla, el teclado y el ratón.
3.2 Unidad de Control DCC.
Recibe del Ordenador Central las órdenes de control, que son amplificadas y llevadas a los raíles y aceptadas por las locomotoras y otros módulos de dispositivos. Línea roja de la figura 8. Y envía al Ordenador Central las señales digitales leídas por los módulos de Retroseñalización. Línea verde de la figura 8. Estas señales reflejan los estados de ciertos dispositivos tales como la posición de los desvíos, el estado de ocupación de los cantones etc. permitiendo al Ordenador Central tomar decisiones en función de dichos estados.

Figura 9. Diversas opciones con pantalla táctil para dar comandos y manejar la Carbonera (Para los técnicos: Arduino comunicándose con el programa)
3.3 Módulos de Dispositivos.
Los Módulos de Dispositivos son circuitos electrónicos que en esta maqueta actúan sobre los 35 desvíos, 28 señales luminosas, 29 farolas, 3 fusibles electrónicos, 2 pasos a nivel, el sistema día/noche, carbonera, selección de altavoces en las estaciones etc. Pueden actuar sobre ellos de formas diversas: por impulsos de duración programada, por una señal continua, por intermitencias, con relés etc. (Figura 11).
3.4 Retroseñalización
Sirven para que el ordenador conozca el estado actual del sistema a través de algunos dispositivos. Como ejemplo de estados leídos por estos módulos están: estado libre/ocupado de un fragmento de vía (zona de un cantón), posición recto/desviado de los desvíos, si una palanca (Figura 2) está arriba/abajo, fusible electrónico montado/caído, etc. Se conectan todos a través del bus (Para los técnicos: S88) representado por las líneas verdes en la Figura 8.

Figura 10. Placa con 8 sensores de ocupación de vía por consumo de corriente para la retroseñalización. Se han necesitado 18 de ellas para las 139 zonas de los 45 cantones. (Para los técnicos: con bus S88)
En total se usan en la maqueta 258 señales (bits) de retroseñalización. De ellos, 136 bits son para detectar la presencia de trenes en las 136 zonas que componen los 44 cantones con una circuitería con diseño específico (Figura 10), 70 bits son para conocer el estado de la posición de los 35 desvíos, 48 bits lo son para conocer la posición de las 24 palancas de las estaciones y el resto son retroseñales de los fusibles electrónicos y del estado de las barreras del paso a nivel.

Figura 11. Circuitería electrónica. En la parte inferior de la maqueta se aloja la electrónica, tanto para activar dispositivos (desvíos, señales, farolas, paso a nivel, etc.) como para la retroseñalización (ocupaciones de vía, posición de desvíos, estado de fusibles, palancas de estaciones). Lo que se ve en la foto es la mitad. La otra mitad está al otro lado de los travesaños.
La detección de ocupación de las diferentes zonas de un cantón (entre 1 y 5 zonas por cantón) se logra detectando una ligera caída de corriente sobre los raíles. La sensibilidad del sistema de detección es tal que situando un vagón en cualquier lugar de la vía, ésta aparece como ocupada en el ordenador.
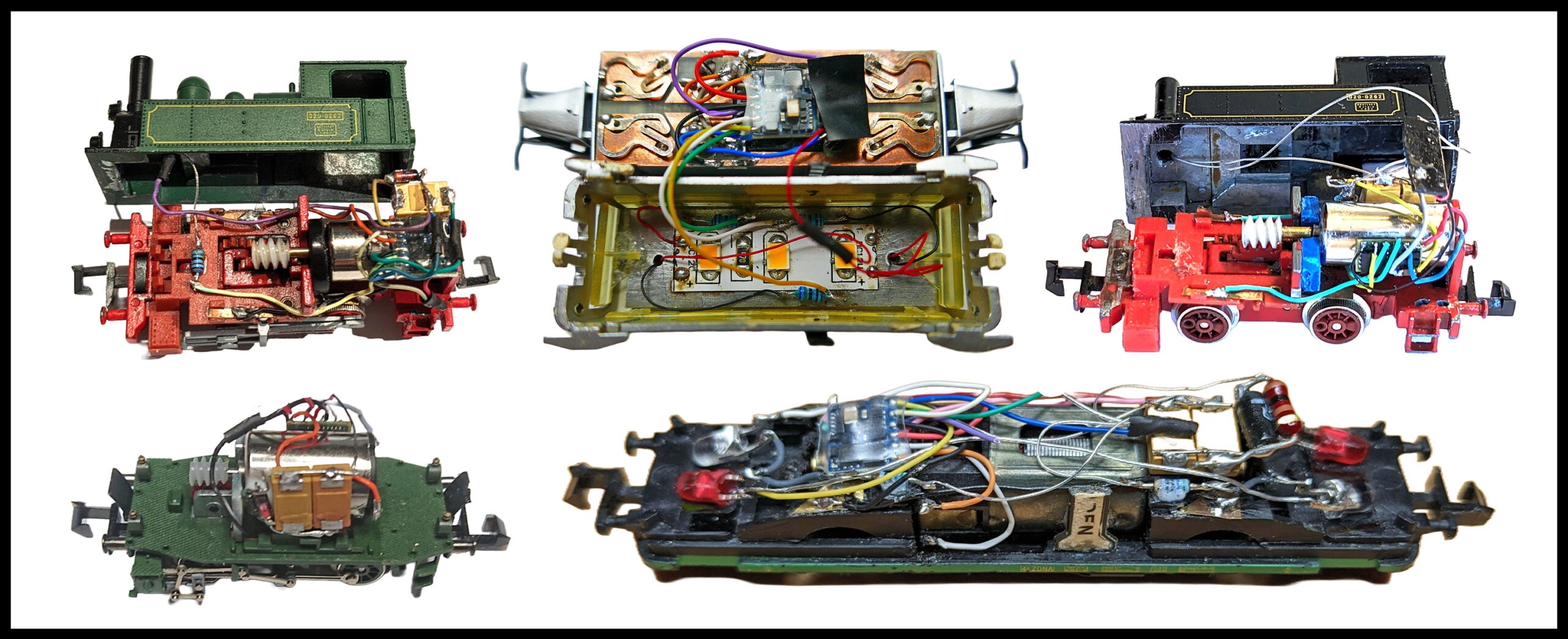
Locomotoras Digitalizadas. Antiguas locomotoras han sido digitalizadas, añadiéndolas, además, diodos para iluminación y condensadores para evitar interrupciones por pérdida de contacto con la vía.
La adaptación del material móvil a la digitalización ha exigido algunas manipulaciones. Cada locomotora ha sido provista de su correspondiente decodificador con o sin sonido. Las uniones eje-rueda de cada vagón se han pintado con pintura de grafito parcialmente conductora. Esto permite detectar la presencia de vagones y que el ordenador tenga conocimiento en todo momento no solo de donde está situada la locomotora de un tren, sino también el resto de vagones de dicho tren.

Figura 15. La densidad de elementos y conexiones situados debajo de la maqueta exige un cierto cuidado en el cableado y la rotulación que no es seguro haber logrado.
4. Software
El hardware y la electrónica asociada es únicamente el apoyo necesario para el software, que es en donde reside la verdadera capacidad de todo el sistema.
4.1 Tablero Control Óptico
La introducción de la informática en los Puestos de Mando de los ferrocarriles ha llevado el control a las pantallas digitales de los ordenadores, convirtiendo a estas en Tableros de Control Ópticos (TCO) (Figura 12).
El operador a través del TCO dispone de una visión y de un control total de la red. Con el uso del ratón y del teclado puede intervenir en la circulación de los todos trenes, actuar sobre los desvíos, señales, bloqueos, itinerarios, rutas, sonidos, velocidades, etc. Para una actuación más extensa, además del ratón y del teclado, dispone de la posibilidad de actuar sobre los controles adicionales situados en diversas pantallas. Existe la opción de modo claro u oscuro en el TCO y resto de las ventanas, activada manual o automáticamente por la programación de la secuencia día/noche del sistema de iluminación.
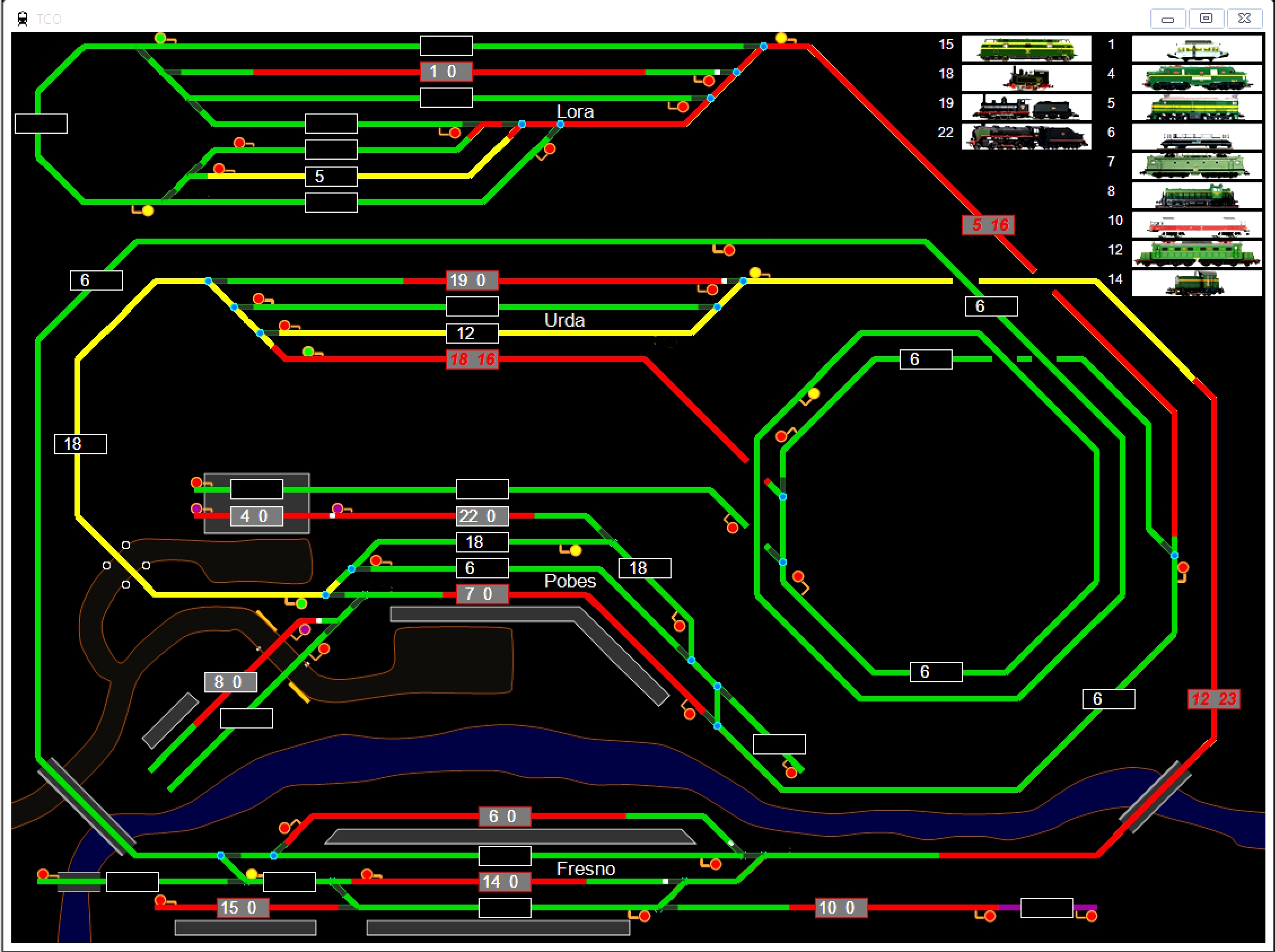
Figura 12. TCO. Es la red de vías representada en la pantalla del Ordenador. Los diferentes colores representan distintos estados de la vía: libre (verde), ocupada (rojo), bloqueada (amarillo), reservada (morado). Cada circulación se indica por su Número de Tren y junto a él su velocidad. Los recuadros solo con el Número de Tren indican cantones bloqueados por el tren o su itinerario. Solo se hacen visibles las señales luminosas del sentido de la marcha del tren; al invertirlo, serán visibles las del sentido contrario. Los desvíos enclavados tienen un punto azul en el corazón del desvío hasta que sean liberados.
4.2 Programa
(Aclaración: Una Zona es el fragmento de vía asociado a un sensor de ocupación. Un Cantón son varias Zonas y los Desvíos asociados. Un Itinerario son varios Cantones. Una Ruta son varios Itinerarios encadenados)
Entre las muchas funciones del programa (Figura 13) podrían señalarse:
- Gestión de todas las comunicaciones del Ordenador Central con la Unidad de Control (para los técnicos: protocolo P50Xb de Intellibox), del sintetizador de voz y de los dispositivos remotos como la App del teléfono móvil y Arduino (Figura 9).
- Gestión de la seguridad de la circulación. Para ello examina la situación de los trenes, señales, desvíos, bloqueos, itinerarios, rutas, y acciones de Maquinistas, Jefe de estación u operador de CTC y deduce la actuación.
- Gestión de inercias. Calculo permanente la distancia del tren a la señal en rojo más próxima a él y en función de ella, lo arranca, acelera, decelera y detiene simulando las inercias del ferrocarril real.
- Gestión de Itinerarios. Un Itinerario lo forman un conjunto de cantones y desvíos que se enclavan. Los Itinerarios se montan posicionando adecuadamente los desvíos. Bloquea estos y los cantones que lo componen hasta el paso del tren, liberándose secuencialmente a su paso. (En la Figura12 los desvíos enclavados están con un punto azul).
- Gestión de Rutas. Una Ruta es un recorrido prediseñado que se le asigna a un tren, permitiendo inversiones de marcha y paradas a lo largo del recorrido por tiempos o por eventos o por prioridades. Asignado un tren a una ruta, esta es montada y controlada automáticamente por el programa, respetando siempre los criterios de seguridad de circulación. Una Ruta se monta con una concatenación de Itinerarios que se van enclavando uno detrás de otro a medida que son recorridos por el tren. Al diseñar la ruta, se permite la gestión de itinerarios alternativos. Si se enlaza el último itinerario con el primero, la ruta es permanente para ese tren. Todos los trenes bajo ruta compiten entre ellos para ir montando y recorriendo cada uno de ellos los itinerarios que componen su ruta, sin necesidad de intervención alguna.
- Trayectos. Seleccionado en tiempo real un origen y un destino cualesquiera, el programa selecciona el camino más corto entre ellos y diseña una Ruta con sus Itinerarios encadenados para ese Trayecto.

Figura 13. Diversas ventanas de uso puntual auxilian la operación. El tamaño del TCO puede aumentarse o disminuirse en función del número de ventanas abiertas. (Utiliza componentes de www.iocomp.com)
- Gestión de cambios de desvíos. Las órdenes son generadas indistintamente por 1) el programa 2) el ratón, 3) el teclado 4) la voz 5) las palancas (de las Estaciones como en la Figura 2). El cambio de un desvío siempre queda pendiente hasta que la seguridad del tráfico lo permite. Nunca provocará descarrilamiento o cortocircuito lo intente quien lo intente.
- Automatizaciones varias. Bucles de retorno (con relés por programa, sin cortocircuitos). Pasos a nivel. Amanecer/ocaso, día/noche. Carbonera DCC. Salvaguarda permanente en disco de todo el estado del sistema.
- Gestión del sonido. Avisos por altavoz en estaciones de la salida y llegada de trenes, activación y desactivación de los sonidos de los motores de las locomotoras, etc.
- Gestión de los Fusibles Electrónicos y recuperaciones. Los cortocircuitos o sobrecargas (sea por descarrilamiento imprevisto u otra causa) o la ausencia parcial o total de alimentación requiere actuaciones inmediatas. Y las paradas de emergencia.
- Control remoto para trenes operados manualmente. Con los mandos inalámbricos usados por los Maquinistas.
- Cálculos diversos. Por ejemplo cálculos totales y parciales de la distancia real recorrida por cada locomotora y tiempo real de circulación para estadísticas y mantenimiento.
- Malla de Circulaciones. Representación gráfica en tiempo real del paso de las circulaciones por las diferentes estaciones. Figura 14a.
- Panel de Salidas. Indicación en tiempo real del destino de los trenes situados en las diferentes estaciones. Figura 14b.
- App Android desde el teléfono móvil que conecta con el programa en el PC para dar las órdenes principales por voz. Figura 14c.

Figura 14a. Malla de 9 Circulaciones con 5 Rutas diversas en la que cada tren, representado por su color, recorre su propia ruta. El programa permitiría, para una mejor observación, seleccionar uno o varios trenes en la Malla, ocultando al resto. Dado que toda la gestión del tráfico puede ser gobernada por el programa y desaparecen los tiempos muertos para montar Itinerarios y Rutas, se produce un intenso tráfico que puede observarse en la Malla.

Figura 14b. Panel de Salidas. Muestra en tiempo real el destino y el tiempo de espera de cada tren situado en cualquiera de las Estaciones, incluidas las ocultas. (Software base de https://remotesign.mixmox.com). Funciona simulando un panel mecánico parecido a los antiguos paneles de estaciones y aeropuertos.

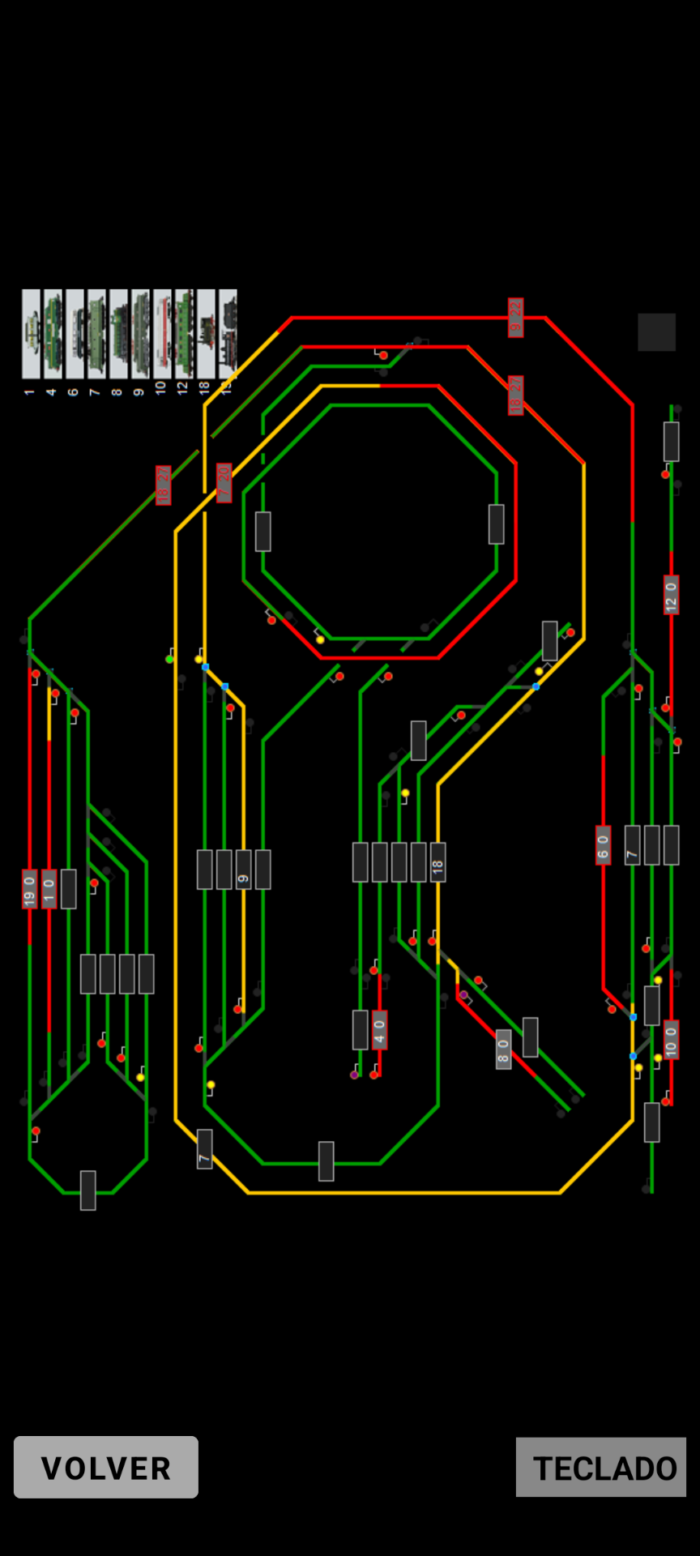
Figura 14c. La App, de desarrollo propio, se conecta con el programa en el PC, permitiendo, entre otras funciones, ejecutar comandos bien con la voz, bien desde teclado del propio teléfono. El TCO tiene zoom.
4.3 Detalles adicionales
- No es necesario ningún sistema de identificación de trenes ya que las ubicaciones de los trenes, a partir de su posición inicial, se rastrean y se mantienen constantemente en tiempo real, detectando su pérdida de contacto con la vía o su desaparición.
- Al finalizar una sesión, se guarda todo su estado y se recupera automáticamente al iniciar la siguiente sesión.
- Las locomotoras pueden ir en cabeza o en cola indistintamente, con tracción simple o doble.
- No son necesarios accesorios, ni indicadores, ni sensores, ni electrónica especial para la frenada. Basta con el cálculo de la distancia a la señal en rojo más próxima al tren para acelerar (está lejos), decelerar (está cerca) o parar (está encima).
- Reloj local (fast clock) que se puede acelerar/decelerar para gestion de los tiempos a escala.
- En las locomotoras con sonido del motor, éste se silencia automáticamente cuando entran en vías ocultas.
- Las acciones de los Operadores o Maquinistas son siempre supervisadas por el programa para evitar incidentes, que podrían ser nefastos.
- En modo automático pueden establecerse rutas. horarios, prioridades, lanzaderas …
- Existe el modo de simulación que permite, para pruebas del software, el funcionamiento del programa sin necesidad de conexión física con la maqueta.

Figura 16. Diversas pestañas de Seguimiento informan en tiempo real sobre cantones, trenes, itinerarios y rutas. Otras pestañas de Configuración modifican también en tiempo real algunos parámetros del funcionamiento de los trenes, del TCO y del Sistema. Están además las pestañas para gestionar la Carbonera y el vagón limpiador, el sonido y el volumen y la Programación de CV, tanto en la Vía de Programación (PT) como de “Programming on the Main”.
4.4 Comandos de Teclado
Conjunto de órdenes a través del teclado para ciertas operaciones, normalmente poco frecuentes. Para la mayoría de las órdenes como cambio se señales y desvíos solo es necesario el uso del ratón. Se usa el mando inalámbrico o el teléfono móvil para otras operaciones como arranque/parada global o de emergencia y las de conducir las locomotoras. Existen Comandos de Teclado específicos para gestionar los Trenes, los Cantones, las Rutas, los Itinerarios, los Desvíos y otros para acciones Globales sobre la maqueta.

5. Resumen de Datos
5.1 Datos que gestiona el Programa
Por cada locomotora:
- Velocidad actual y máxima admitida.
- Nivel de aceleración y deceleración.
- Distancia a la señal en rojo más próxima.
- A qué distancia del rojo comenzar el frenado.
- Sentido de la marcha.
- Cantones que ocupa la composición del tren.
- Acumulado de distancia recorrida y de tiempo andando.
- Estado de las teclas de función (hasta 16) de la locomotora.
Por cada desvío:
- Posición actual.
- Pendiente de cambio o no.
- Enclavado por itinerario o no.
- Bloqueado por Operador (impide ser enclavado por un Itinerario)
Por cada cantón:
- Categoría del cantón. (Oculto, estación, solo desvíos, vía muerta, bucle de retorno, etc.).
- Cantón precedente y siguiente a él según la posición de los desvíos.
- Estado de la señal luminosa (verde, rojo, ámbar).
- Estado de cada zona del cantón (libre, ocupada).
- Tren que bloquea u ocupa el cantón y su velocidad.

Figura 18. El edificio de estación a la izquierda y el tinglado de la derecha es una reproducción de la ya desaparecida estación de Pobes (Alava) realizado por Javier G. Fontela.
5.2 Datos numéricos y técnicos
Datos numéricos:
- Escala: N (1:160).
- Dimensiones: 2×1 metros.
- Radio mínimo: 22,8 cm. Solo en vías ocultas.
- Pendiente máxima: 29 milésimas en la espiral.
- Vías: Peco código 55 y código 80.
- Longitud de vias + desvíos: 28 metros.
- Motores de Desvíos: 30 Tortoise y 6 Peco.
- Cantones: 45, cada uno desde 1 y hasta 5 zonas.
- Detectores ocupación: 139 sensores de corriente.
- Señales luminosas a led: 28 de 2/3 aspectos
- Farolas regulables: 29
Datos técnicos:
- Unidad de control DCC: Intellibox IR.
- Bus de locomotoras y dispositivos: DCC.
- Bus de retroseñalización: S88N y Loconet.
- Decodificadores de locomotoras: ESU, D&H.
- App teléfono movil: Android Studio.
- Pantalla táctil: Arduino.
- Mandos inalámbricos: Iris.
- Iluminación amancer/ocaso: IntelliLight 28200 DCC.
- Protocolo de comunicación PC<–>Intellibox: P50Xb.
- Lenguaje de programación: C++, STL.
- Sintetizador de texto a voz: TTS de MS-Windows
- Reconocedor de voz a texto: Librerías de Vosk

Figura 19. La iluminación puede gobernarse manualmente o por programa a través de los ciclos noche/dia regulables que automáticamente actúan sobre las farolas y resto del alumbrado.
6. Ejemplo de programación
(Curiosidad para programadores)

Figura 20. La página es una parte del código que se ejecuta cuando un tren ocupa un cantón que previamente estaba libre.
7. Video. Trenes moviéndose
Un video, por si el lector tuviera alguna curiosidad añadida y ver trenes en movimiento, de 7:17 minutos (con subtítulos aclaratorios y complementarios):
8. Poster de trenes Renfe